Automated File Delivery Robot
Final-year engineering project
Final-year engineering project focused on improving an autonomous office file-delivery robot with better workflow design, authentication, delivery request handling and digital integration.
Project stack
Visual proof

Rendered exterior view of the automated file-delivery robot body.
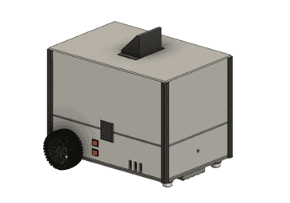
Angled CAD render showing the chassis, wheel position and enclosure form.
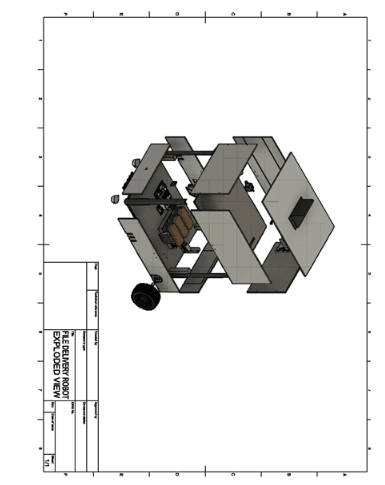
Exploded CAD view showing internal structure and component placement.
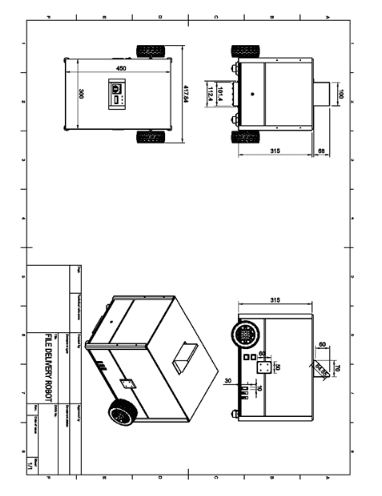
Technical drawing with projected views and key dimensions.
Case study
problem
Office file movement can interrupt staff workflows and make physical handoff harder to track across departments.
built
My final-year project direction improves an automated file-delivery robot with digital request handling, location selection, authentication and delivery workflow thinking.
challenge
The main challenge is connecting physical movement with secure digital instructions, status visibility and real office usability.
learned
The project deepened my interest in robotics systems that combine embedded hardware, web/mobile control and human-centered workflow design.
impact
It is the clearest proof of my hardware-meets-software identity because the solution crosses robotics, automation, authentication and software integration.
Overview
The project addresses a practical office problem: moving physical files between departments can waste time and interrupt workflows.
My team's direction connects the robot's movement with a digital control system where verified users can request deliveries, select pickup/destination locations, monitor status and support secure handoff.
Highlights
Robotics, embedded systems, office automation and route-planning concepts.
Authentication, authorization, request handling and delivery workflow thinking.
Firestore/Firebase Realtime Database planning and web/mobile integration direction.
A strong hardware-meets-software capstone project.